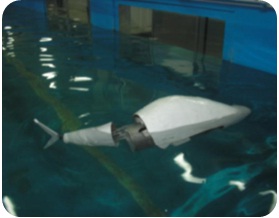
- طراحی و ساخت رباتماهی
استفاده از قوانین طبیعت و مکانیزم حرکتی ماهیها برای ساخت انواع ربات های زیر آبی موضوع بسیار مهمی است که طی سالهای اخیر مورد توجه واقع شده است. در راستای دستیابی به این تکنولوژی فعالیتهای گسترده ای آغاز شده و نمونه های مختلفی از ربات ماهی ها ساخته شده است.
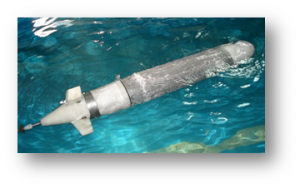
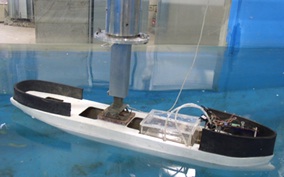
- طراحی و ساخت ربات زیرآبی
رباتهای زیر آب از نوع ROV معمولاً محدودیتهای زیادی بهعلت وابستگی به شناورهای پشتیبان دارا هستند. بر این اساس مستقل شدن ربات فوق و تامین توان و هدایت آن بصورت خودکار بسیار مهم است. انواع AUV (Autonomus Underwater Vehicles) در این راستا طراحی شده و در حال حاضر نمونه ای از آن ساخته شده است.
-
تهیه نرم افزار شبیهساز شناور تندرو
عمده شبیه سازهای توسعه داده شده در سطح دنیا مختص شناورهای جابجایی هستند. در این پروژه با هدف توسعه شبیه ساز شناورهای تندروی پروازی یک نرم افزار شش درجه آزادی توسعه داده شده است که قادر است حرکات شناور تندرو تحت اثر امواج و مانور آن را شبیه سازی کند. نتایج با استفاده از تست مدل اعتبار سنجی شده است.

- طراحی، ساخت و تست مدل هواناو
در این پروژه علاوه بر انجام مطالعات لازم در زمینه طراحی، ساخت و تست هواناوها و طراحی و انجام تست بالشتک برای مدل هواناو از نوع کیسه و انگشتی و ساخت اسکرت برای دو مدل ۱ و ۲/۵ متری و نصب آن، ساخت دو مدل کامل ۱ و ۲/۵ متری هواناو و خودرانش کردن مدل ۲/۵ و انجام تستهای هیدرودینامیکی هواناو و مقاومت و بررسی دریامانی آنها پرداخته شده است. در طی این پروژه برای اولین بار در سطح کشور اصول تست شناورهای بالشتک هوایی تدوین شده و قابلیت های دریانوردی هواناو از نظر عملکرد در امواج، مقاومت و مانور ارزیابی شده است.
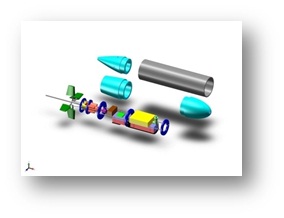
در قالب این پروژه هندسه بدنه AUV و سیستم رانش و همچنین سطوح کنترلی طراحی شده و مورد تحلیل عددی قرار گرفت و مشخصات هیدرودینامیکی بدنه و پیشبرنده استخراج گردید. بخش دیگری از این پروژه طراحی سیستم مکانیزم جهت کنترل حرکات سطوح کنترلی جهت دستیابی به سناریوی مانور تعریف شده است.

- تست مدل اسلاشینگ شناورها در حوضچه کشش
پدیده اسلاشینگ به دلیل نوسانات سطح مایع درون مخازن نفت کش ها رخ می دهد. در مرکز پژوهشی مهندسی دریا، شناور نفت کش در شرایط محیطی مختلف با ارتفاع مایع های متفاوت درون مخزن تست شده است و فشار وارد بر دیوارهای مخزن اندازه گیری شده است و بررسی پایداری و نوسانات شناور در حالت های متفاوت لحاظ شده است.
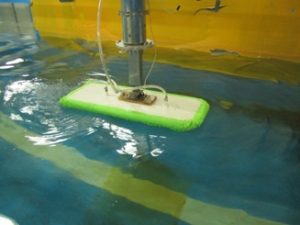
- طراحی، ساخت و تست مدل سکوی پایه کششی
سکوهای شناور از نوع پایه کششی یک نوع سکوی تطبیقی است که دارای سیتم مهار عمودی با نیروی شناوری اضافه می باشد. این نوع سکوها معمولا برای حفاری در آب عمیق مورد استفاده قرار می گیرد. از مهمترین خواص این سکوها می توان به استخراج نفت در حوزههای نفتی بزرگ اشاره کرد. در بعضی از نقاط جهان از این سکو به عنوان تکیهگاه توربینهای بادی نیز استفاده میشود. مدل آزمایشگاهی سکوی ISSCTLP درآزمایشگاه مهندسی دریا دانشگاه شریف ساخته شده و دامنه پاسخ حرکات صفحه افق سکو به همراه نمودار تاریخچه زمانی این حرکات در حالت پایدار و صدمه دیده در زوایای مختلف برخورد موج منظم و مقادیر پیشکشیدگیهای مختلف توسط تاندونها استخراج شده است.

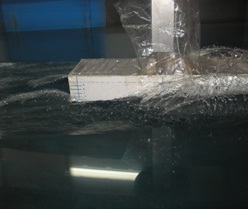
- تست مدل شناور پروازی مجهز به اینترسپتور

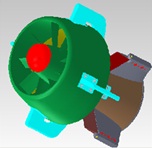
- طراحی، ساخت و تست داکت پاشنه جهت کاهش مصرف سوخت شناورها
در این پروژه هدف طراحی و ساخت یک داکت متعادل کننده ویک بمنظور بهبود عملکرد سیستم رانش و کاهش مصرف انرژی بوده است. در این راستا از ترکیب شبیهسازی عددی و تستهای آزمایشگاهی استفاده شده است. داکتهای متعادل کننده ویک، شامل دو اثر مهم میباشند که در کاهش مصرف انرژی موثراند، یکی اثر داکت روی بدنه و دیگری اثر داکت روی پروانه. هنگامی که داکت در پاشنه شناور نصب میشود، میدان فشار در ناحیه پاشنه شناور، متاثر از داکت گشته و نهایتاً جدایش جریان در ناحیه پاشنه به تأخیر میافتد و مقاومت شناور کاهش یافته و نهایتاً مصرف سوخت شناور در سرعت طراحی کاهش مییابد. همچنین با بهبود میدان ویک ورودی به پروانه، عملکرد پروانه بهبود مییابد و افزایش راندمان پروانه نیز نهایتاً در کاهش مصرف سوخت موثر خواهد بود.

